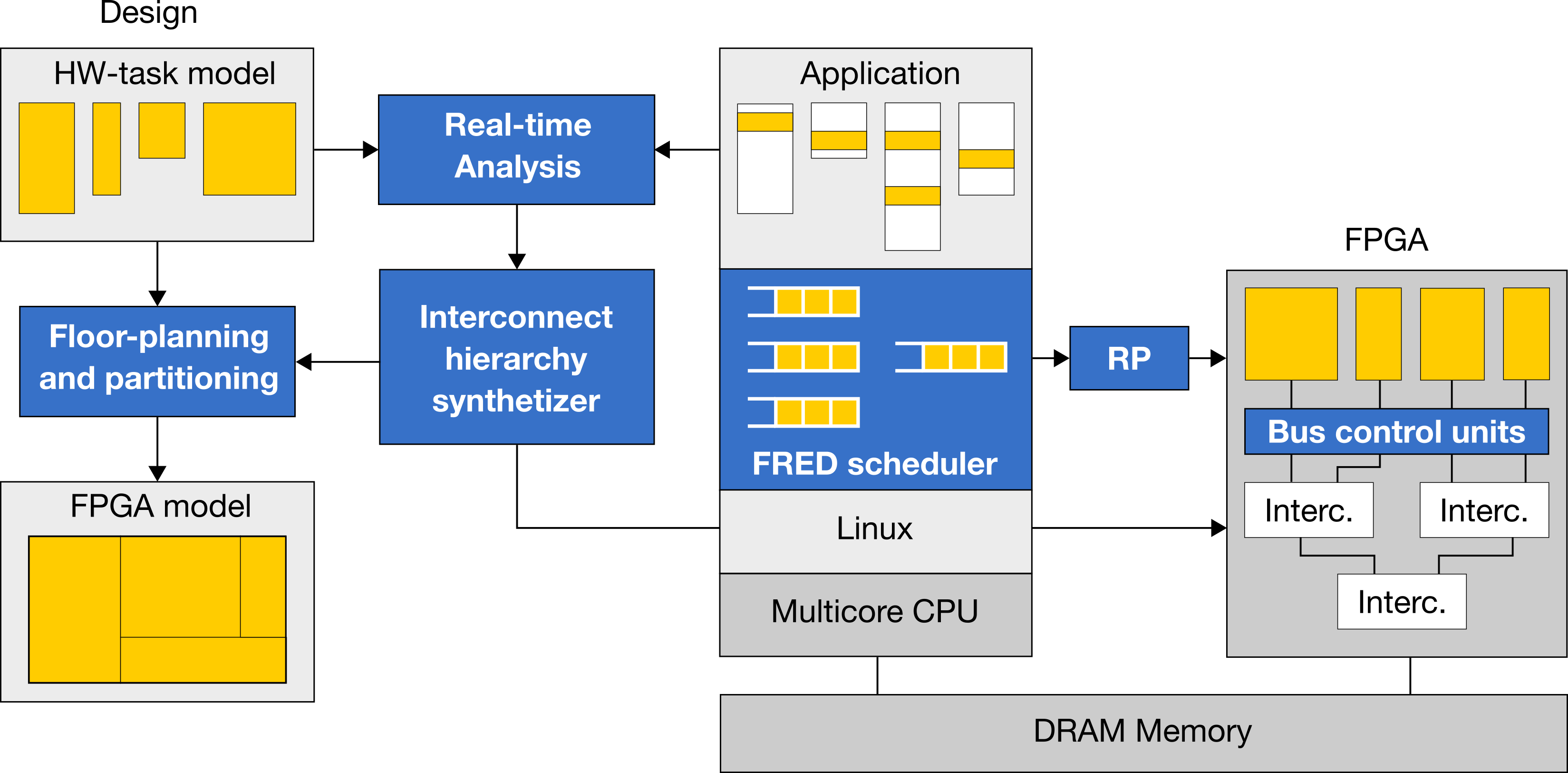
FRED is a framework to support the design, development, and execution of predictable software on FPGA system-on-chips. It exploits dynamic partial reconfiguration and recurrent execution to virtualize the FPGA fabric, enabling the user to allocate a larger number of hardware accelerators than could otherwise be fit into the physical fabric. It integrates automated floorplanning and a set of runtime mechanisms to enhance predictability by scheduling hardware resources and regulating bus/memory contention.
The following set of tools and mechanisms are available:
FLORA: a floorplanner that optimizes the allocation of hardware accelerators on the FPGA fabric.
FRED runtime: a Linux support (exposed via both C and Python API) for managing hardware acceleration requests executing on a virtualized FPGA fabric with predictable response times.
FRED analyzer: a schedulability analysis tool that verifies whether a set of real-time tasks and hardware accelerators can be executed within their timing constraints, taking into account all the sources of delays introduced by the architecture.
Predictable bus manager: a bus control unit that allows achieving predictable arbitration, protection from timing attacks, and bandwidth isolation to shield the system from misbehaving accelerators.
Bus synthetizer: an automatic synthesis tool that optimizes the Interconnect hierarchy to match timing constraints.
A Preemptive reconfiguration port has also been implemented to reduce blocking times in high priority tasks caused by conflicting reconfiguration requests.
Programming model
The FRED framework targets system-on-chips that include both general-purpose processors and an FPGA fabric, sharing a common memory. The framework manages two kinds of computational activities:
- software tasks (SW-tasks), which are computational activities running on the processors; and
- hardware tasks (HW-tasks), which are hardware accelerators that can be programmed to execute on the FPGA fabric.
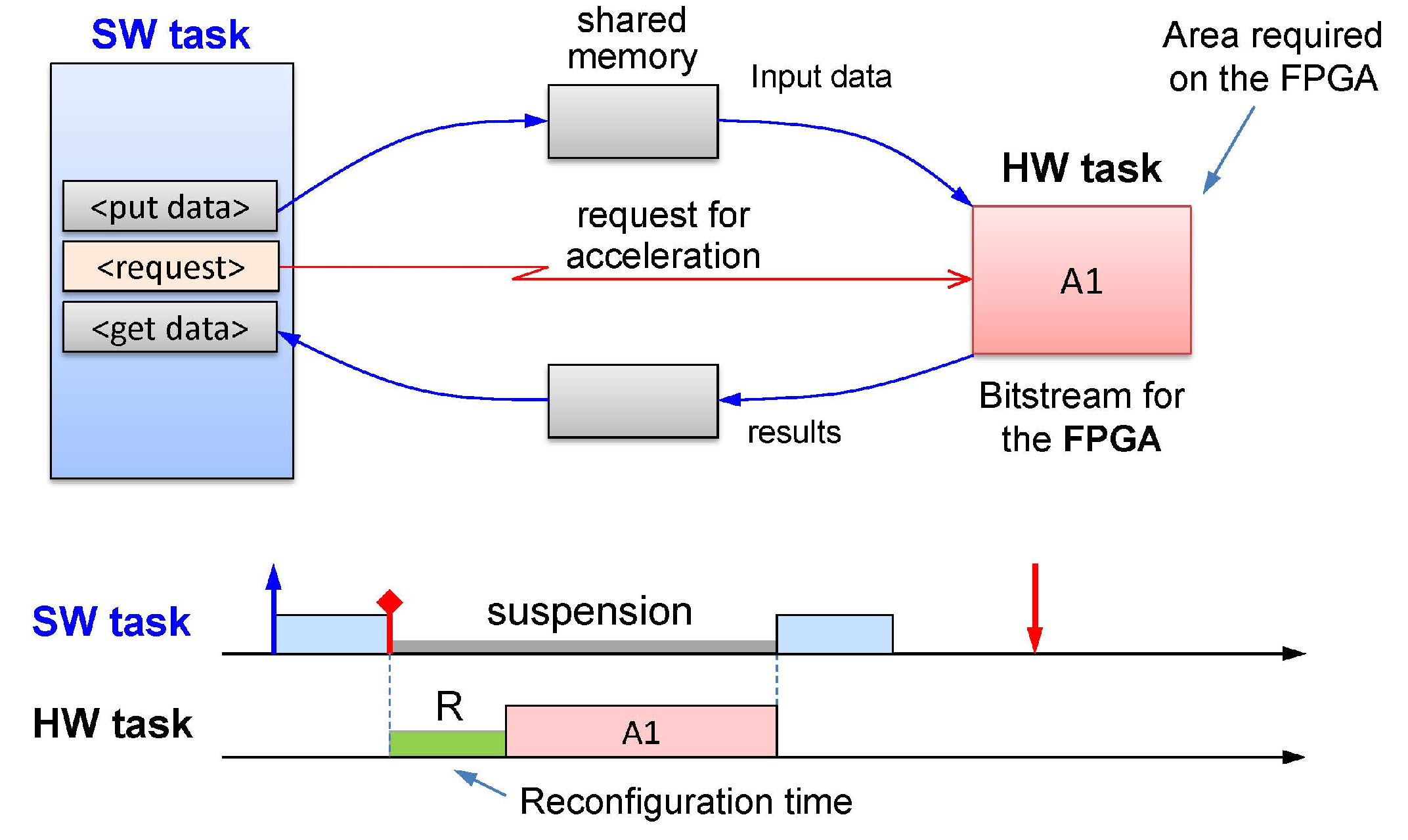
The interaction between SW-tasks and HW-tasks is illustrated in the above figure.
SW-tasks can request the execution of HW-tasks to accelerate specific computations. These acceleration requests are managed by the FRED framework to ensure that they are served with a predictable and bounded delay.
A shared-memory communication paradigm with blocking synchronization is employed between SW-tasks and HW-tasks.
Before requesting an acceleration, a SW-task must fill a buffer with the input data to be processed by the HW-task (
SW-tasks are scheduled by the operating system that controls the processors. To ensure predictability in scheduling SW-tasks, FRED mandates the use of partitioned fixed-priority scheduling (each SW-task is statically allocated to a processor and assigned of a static priority).
Conversely, the acceleration requests are directly managed by the FRED runtime with a custom scheduling policy.